Siemens Mobility i Railway Robotics zaprezentowały prototyp kolejowego robota inspekcyjnego. Urządzenie powstało w Norwegii i jest obecnie sprawdzane m.in. w centrum Campus Nyland. To laboratorium, które powstało w ramach realizacji projektu wdrażania ERTMS/ETCS.
W 2018 r. norweska spółka Bane NOR, odpowiadającą za utrzymanie, obsługę i rozwój infrastruktury kolejowej w kraju, podpisała z Siemens Mobility umowę na wdrożenie i utrzymanie systemu ETCS poziomu 2 na całej norweskiej sieci kolejowej. Sam kontrakt jest wart 800 mln euro i jego realizacja według pierwotnych założeń miała potrwać do 2034 r. Jest to także część dużego programu cyfryzacji norweskiej kolei i wdrażania ERTMS na terenie kraju.
16 listopada 2024 r. na linii łączącej Oslo z Gjøvik, na odcinku pomiędzy Roa a Gjøvik, uruchomiony został system ERTMS. To pierwsza linia kolejowa w Norwegii, na której nie zobaczymy już tradycyjnych urządzeń sygnalizacyjnych.
Docelowo cała norweska sieć kolejowa, licząca ok. 4,2 tys. km linii kolejowych (w tym 337 km linii dwutorowych) oraz 375 stacji, ma być zarządzana centralnie. Łączna wartość prowadzących do tego prac wyniesie ok. 2 mld euro.
Centrum szkoleniowe
Jednym z pierwszych efektów realizacji umowy z Siemens Mobility było otwarcie pod koniec października 2019 r. centrum szkoleniowego Campus Nyland, w którym testowane są nowe rozwiązania. Ma ono dwa podstawowe zadania: z jednej strony szkolić pracowników kolei w zakresie funkcjonowania systemów ERTMS i ETCS, a z drugiej służyć jako poligon testowy dla nowych rozwiązań.
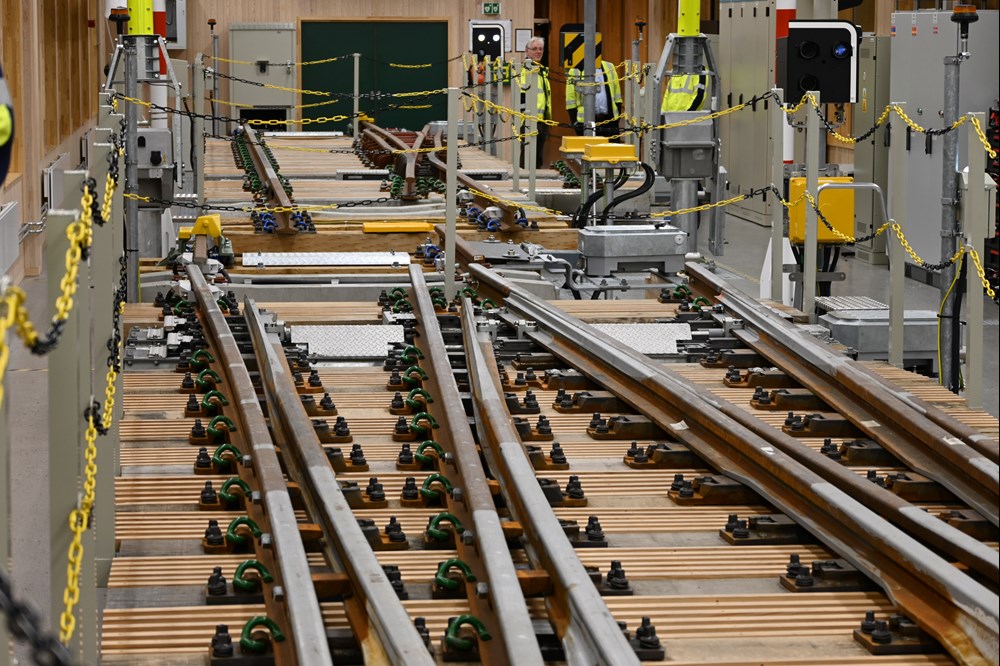
W związku z tym w ramach centrum przygotowano zabudowany pod dachem niewielki fragment toru połączony z urządzeniami ETCS, systemem GSMR, rogatkami przejazdowymi i fragmentem mechanizmów zwrotnicy pozwalającym na testowanie wszystkich rozwiązań. W centrum zlokalizowane są też dwa środowiska testowe pozwalające na symulowanie prac centrów sterowania ruchem kolejowym – jedno z nich połączone jest z zabudowanymi urządzeniami.
Wszystko to było wykorzystywane do testowania współpracy urządzeń pokładowych z przytorowymi. Infrastruktura centrum jest jednak przydatna także przy realizacji innych projektów – jednym z nich jest realizowany przez Rilway Robotics przy współpracy z Bane NOR projekt stworzenia kolejowego robota inspekcyjnego.
Poznajcie Railchap
Pod koniec lutego 2025 r., na wspomnianym fragmencie toru zabudowanym w Campus Nyland, robot pomiarowy Railchap został zaprezentowany po raz pierwszy. Przedstawiciele Rilway Robotics pokazali, jak sterowany zdalnie przez pracownika robot przemieszcza się po torze i zbiera dane.
Prototypowy Railchap waży ok. 50-60 kg w zależności od liczby zamontowanych urządzeń pomiarowych. Jest w stanie poruszać się samodzielnie z prędkością do 20 km/h oraz może być sterowany zdalnie przez pracownika.
Robot przechodzi obecnie proces homologacji i ma być wykorzystywany w przyszłości przez norweskiego zarządcę infrastruktury.
Celem opracowania robota jest zwiększenie dokładności i skrócenie czasu dokonywania inspekcji infrastruktury kolejowej, a zwłaszcza rozjazdów. Konstruktorzy podkreślają, że pomiary dokonywane w sposób tradycyjny przez pracowników kolei zajmują nie tylko czas, ale także, że ich wyniki mogą być uzależnione od wielu czynników, w tym pogody i umiejętności samych pracowników, przez co mogą wymagać licznych poprawek. Zaletą robota ma być też praca od samego początku w cyfrowym środowisku, co ma ułatwiać gromadzenie danych i ich łatwiejsze udostępnianie oraz dalsze wykorzystywanie.
Zdaniem twórców wykorzystanie robota pomiarowego może skrócić czas potrzebny na przeprowadzanie inspekcji sześciokrotnie oraz przynieść redukcję kosztów sięgającą 80%.

























 Zapisz
się do newslettera:
Zapisz
się do newslettera:







![Vectrain na InnoTrans. Dojedzie do Berlina nie tylko na targi [zdjęcia]](https://www.rynek-kolejowy.pl//img/20240925140538V1a.jpg_213-100.jpg "Vectrain na InnoTrans. Dojedzie do Berlina nie tylko na targi [zdjęcia]")
: Polska kluczowym rynkiem, czekamy na KDP")

